|
Yuchang Jiang I'm a PhD student in the EcoVision Lab, Department of Mathematical Modeling and Machine Learning, University of Zurich, supervised by Jan Dirk Wegner and Konrad Schindler. My research focuses on computer vision and remote sensing, with an emphasis on vegetation parameter estimation, forest type mapping, and imbalanced data challenges. I am driven by a passion for applying deep learning techniques to tackle scientific challenges. I have interned in Google DeepMind, mainly working with Maxim Neumann and Dan Morris. I earned my master's degree from ETH Zurich and my bachelor's degree from The Hong Kong Polytechnic University. During my master's studies, I specialized in computer vision and deep learning, focusing on multi-object tracking and remote sensing challenges. |

|
|
|
|
|
|
News
|
Data Download |
ResearchI'm interested in computer vision, deep learning, and their applications in remote sensing. |
|
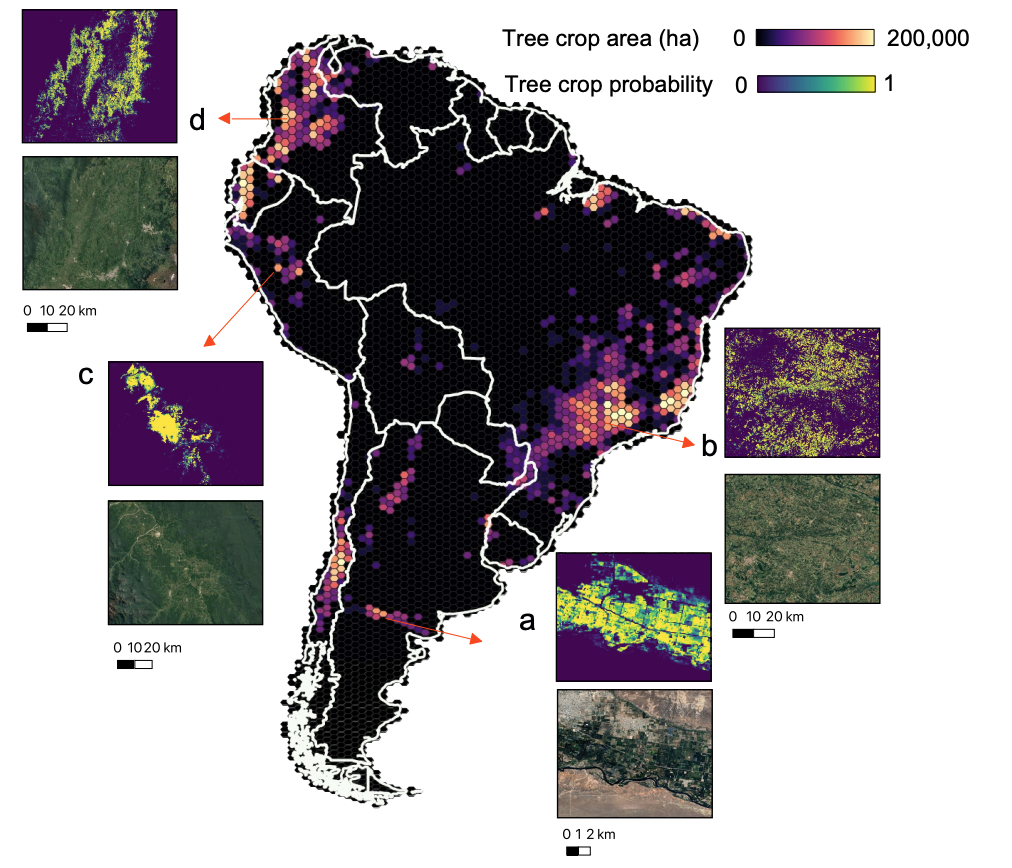
Tree Crop Mapping of South America Reveals Links to Deforestation and Conservation
Yuchang Jiang, Anton Raichuk, Xiaoye Tong, Vivien Sainte Fare Garnot, Daniel Ortiz-Gonzalo, Dan Morris, Konrad Schindler, Jan Dirk Wegner, Maxim Neumann Preprint, 2026 arXiv Monitoring tree crop expansion is vital for zero-deforestation policies like the European Union’s Regulation on Deforestation-free Products (EUDR). However, these efforts are hindered by a lack of highresolution data distinguishing diverse agricultural systems from forests. Here, we present the first 10m-resolution tree crop map for South America, generated using a multi-modal, spatio-temporal deep learning model trained on satellite imagery time series. While the map is experimental and carries known uncertainties, it offers a new perspective on the distribution of complex tree crop agricultural system |
|
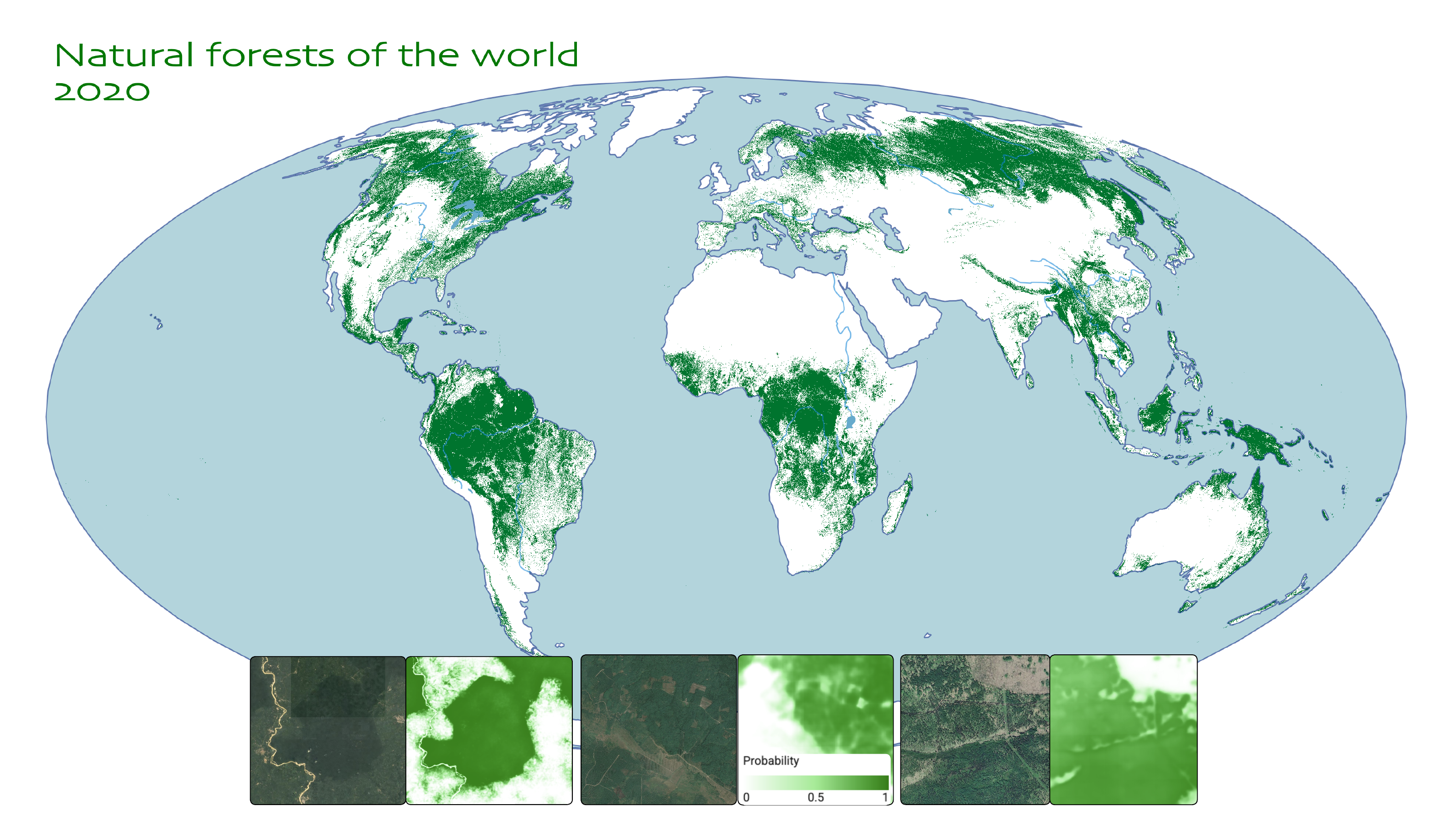
Natural Forests of the World -- A 2020 Baseline for Deforestation and Degradation Monitoring
Maxim Neumann, Anton Raichuk, Yuchang Jiang, Melanie Rey, Radost Stanimirova, Michelle Sims, Sarah Carter, Elizabeth Goldman, Keith Anderson, Petra Poklukar, Katelyn Tarrio, Myroslava Lesiv, Steffen Fritz, Nicholas Clinton, Charlotte Stanton, Dan Morris, Drew Purves Nature Scientific Data, 2025 paper / blog / data Identifying natural forests, which serve as critical biodiversity hotspots and major carbon sinks, is particularly valuable. We developed a novel global natural forest map for 2020 at 10 m resolution. This map can support initiatives like the European Union's Deforestation Regulation (EUDR) and other forest monitoring or conservation efforts that require a comprehensive baseline for monitoring deforestation and degradation. |
|
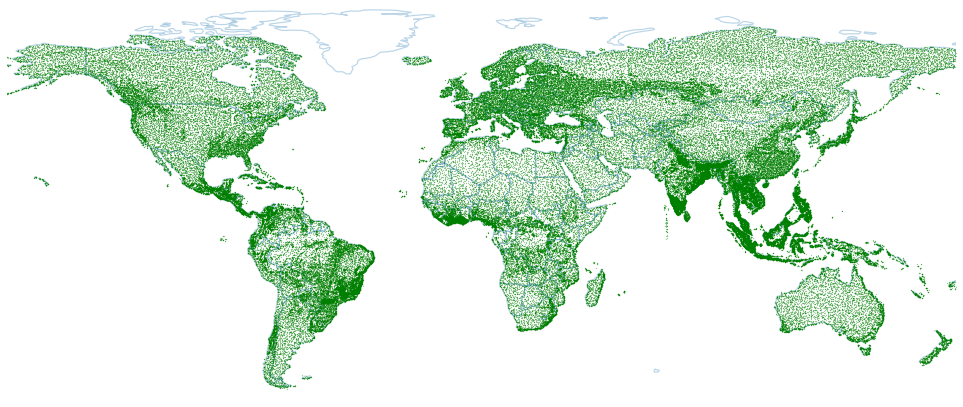
Not Every Tree is A Forest: Benchmarking Forest Types from Satellite Remote Sensing
Yuchang Jiang, Maxim Neumann IEEE International Geoscience and Remote Sensing Symposium, 2025 arXiv / code ForTy is a new global-scale, multi-modal, and multi-temporal benchmark dataset designed for advancing global FORest TYpes mapping. It comprises 200,000 time series of image patches, each including Sentinel-2, Sentinel-1, climate, and elevation data. The dataset features per-pixel annotations that distinguish between three key forest types (natural forest, planted forest, tree crops). |
|
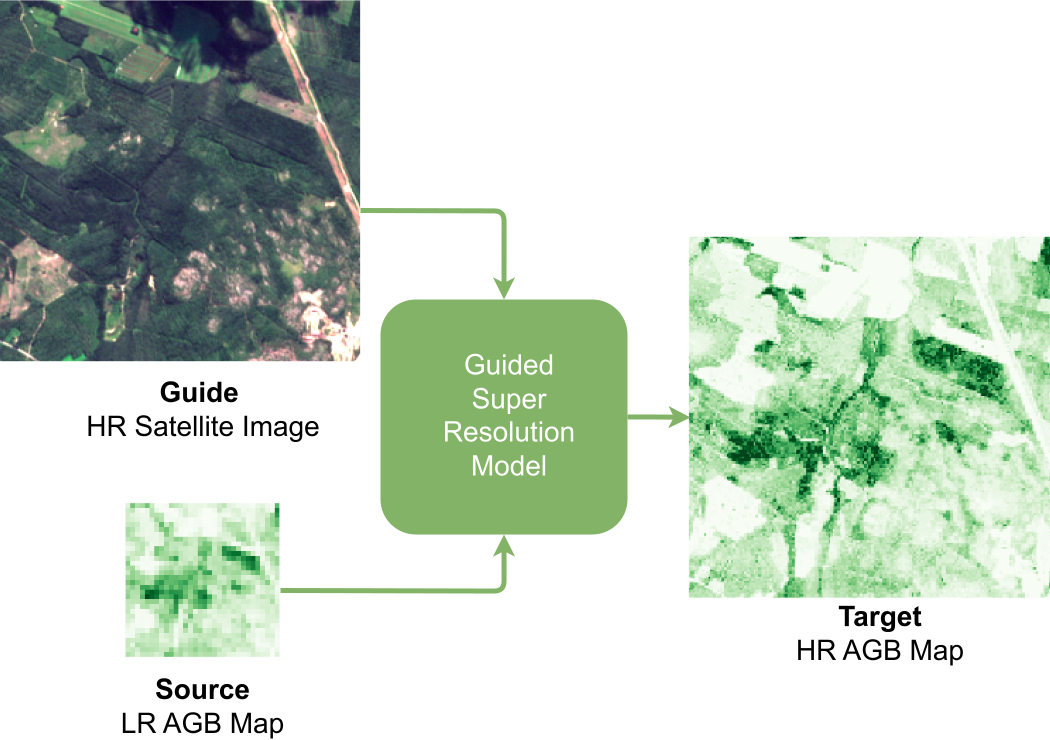
GSR4B: Biomass Map Super-Resolution with Sentinel-1/2 Guidance
Kaan Karaman, Yuchang Jiang, Damien Robert, Vivien Sainte Fare Garnot, Maria João Santos, Jan Dirk Wegner ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2025 arXiv / code We propose a new way to address high-resolution above-ground biomass estimation, by leveraging both high-resolution (HR) satellite observations and existing low-resolution (LR) biomass products. We cast this problem as Guided Super-Resolution, aiming at upsampling LR biomass maps (sources) from 100 to 10 m resolution, using auxiliary HR co-registered satellite images (guides). |
|
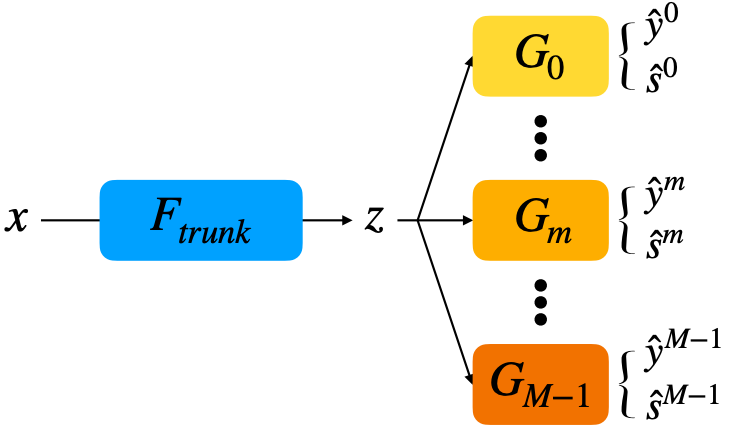
Uncertainty Voting Ensemble for Imbalanced Deep Regression
Yuchang Jiang, Vivien Sainte Fare Garnot, Konrad Schindler, Jan Dirk Wegner GCPR, 2024 arXiv / code UVOTE integrates recent advances in probabilistic deep learning with an ensemble approach for imbalanced regression. We replace traditional regression losses with negative log-likelihood, which also predicts sample-wise aleatoric uncertainty. |
|
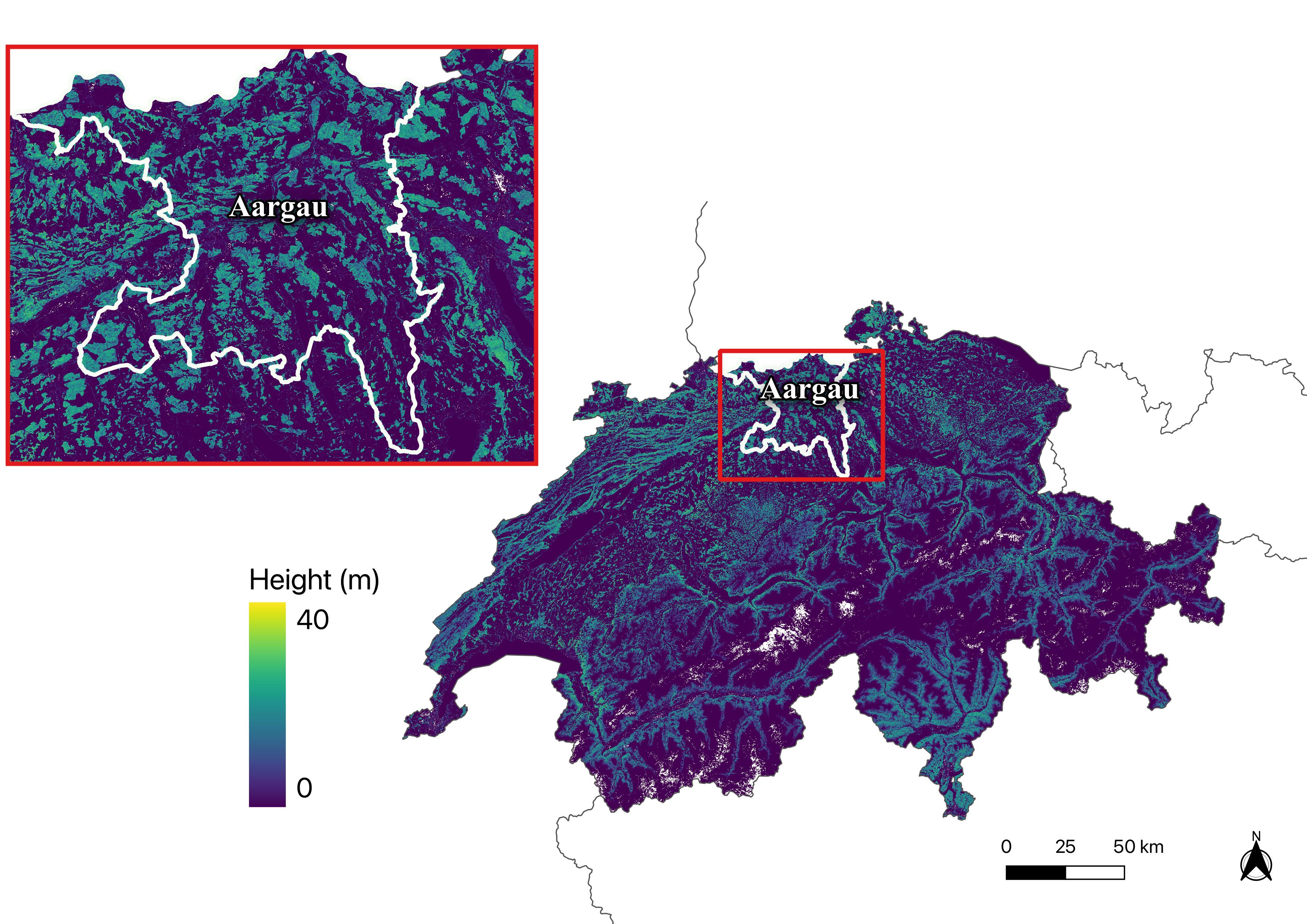
Accuracy and Consistency of Space-based Vegetation Height Maps for Forest Dynamics in Alpine Terrain
Yuchang Jiang, Marius Rüetschi, Vivien Sainte Fare Garnot, Mauro Marty, Konrad Schindler, Christian Ginzler, Jan Dirk Wegner Science of Remote Sensing, 2023 paper / code / data download We generate annual, countrywide vegetation height maps at a 10-m ground sampling distance for the years 2017–2020 based on Sentinel-2 satellite imagery and deep learning. |
|
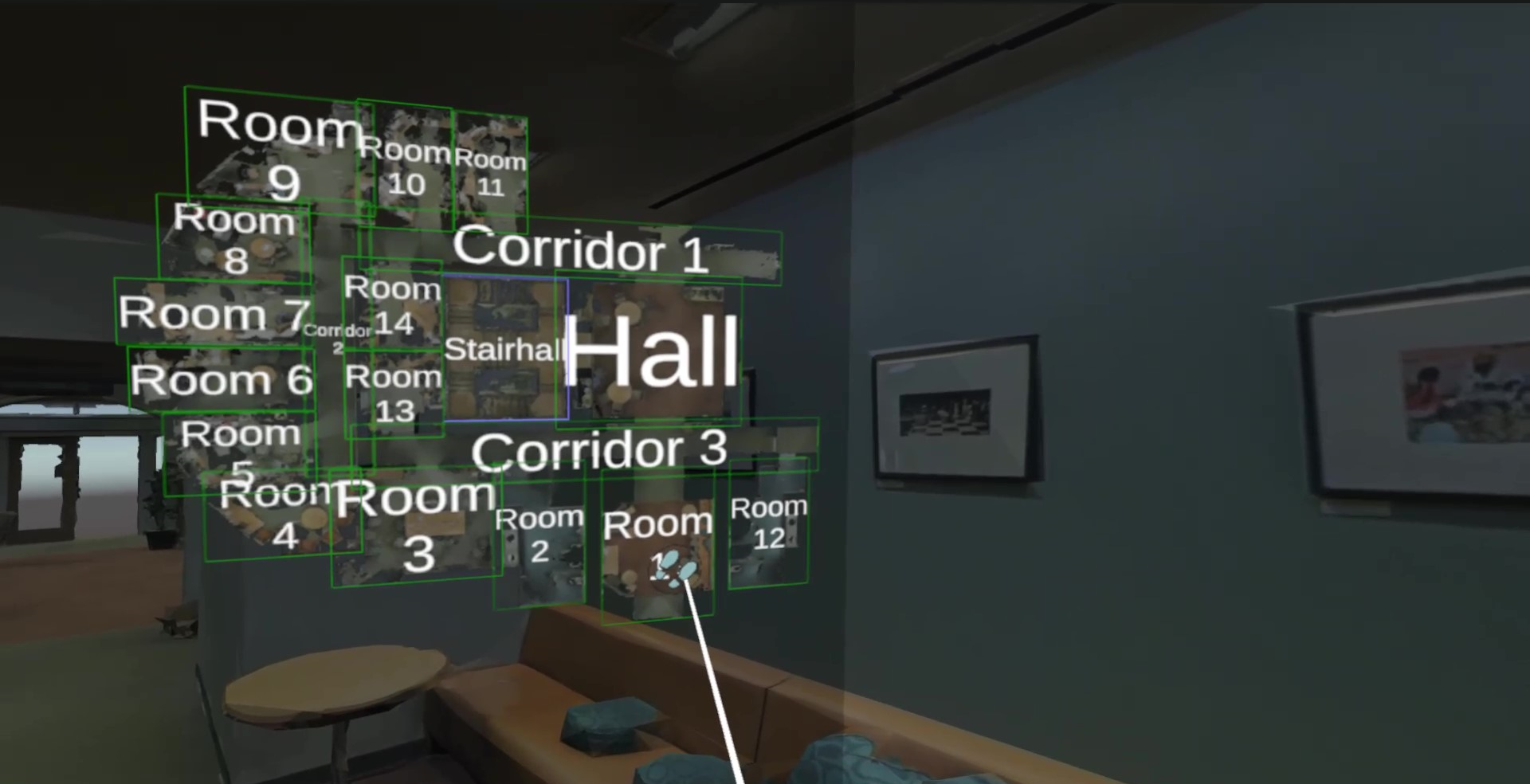
SemSpray: Virtual Reality As-Is Semantic Information Labeling Tool for 3D Spatial Data
Yiming Zhao*, Cyprien Fol*, Yuchang Jiang, Tianyu Wu, Iro Armeni European Conference on Computing in Construction, 2022 paper/ code We propose Semantic Spray (Semspray), a Virtual Reality (VR) application that provides users with intuitive and handy tools to produce semantic information on as-is 3D spatial data (mesh) of buildings. |
|
Learning a Sensor-invariant Embedding of Satellite Data: A Case Study for Lake Ice Monitoring
Manu Tom, Yuchang Jiang, Emmanuel Baltsavias, Konrad Schindler Transactions on Geoscience and Remote Sensing (IEEE), 2022 paper We develop a deep learning framework that learns a joint satellite embedding to fuse MODIS, VIIRS and S1-SAR satellite data for lake icce monitoring. |
|
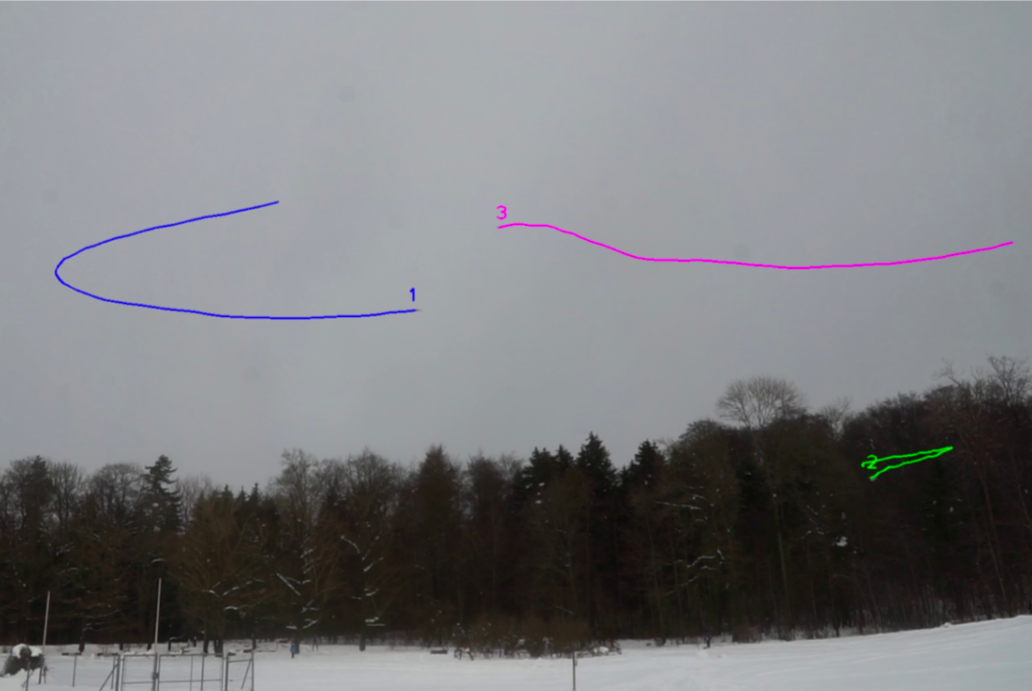
Multi-Target Multi-Camera Drone Tracking
Yuchang Jiang Wissenschaftlich-Technische Jahrestagung der DGPF, 2022 paper We propose an approach to track multiple drones in a roughly synchronized static camera network with unknown camera poses. |
|
3D Player Tracking with Multi-View Stream
Yuchang Jiang, Ying Jiao, Yelan Tao, Tianyu Wu 3DV project, 2021 paper / code We construct a working pipeline for 3d scooer player position tracking, including multi-object tracking in each camera view and multi-camera association. |
MiscI enjoy sports during feel time, mainly badmiton, squash, and swimming. My badminton team in BCZA is always looking for league palyers, especially female players for 2/3. Liga. Feel free to contact me if you're interested 🏸 🏸 🏸 |
|
Thank you for the template Jon Barron. |